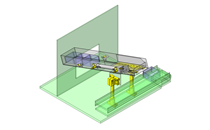
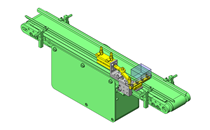
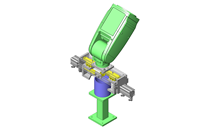
AGV与立体仓库无缝对接,根据调度系统的指令自动完成对象工件的出入库搬运。
规格
用途
通过AGV自动运行,完成立体仓库中对象工件的出入库搬运。
动作・操作性
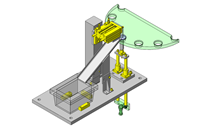
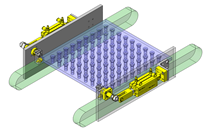
STEP1: AGV根据调度系统指令运行到达物料存放位置或取出位置。
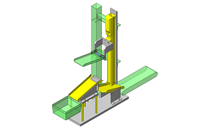
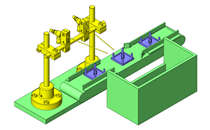
STEP2: 升降机构将旋转移载机构升起至立仓库目标层高度。
STEP3: 扫码器读取货架二维码,识别物料信息。
STEP4: 移载机构根据调度系统指令将物料存入/取出立体仓库货架。
STEP5: AGV如果是取出任务则前往立体仓库出口将物料送出。如果是存入任务回等待位置等待下一指令。
对象工件
形状种类:长方体周转箱
最大外观尺寸:440 X 320 X 170(mm)
材质:-
重量:单箱MAX 50kg
特长
动作规格
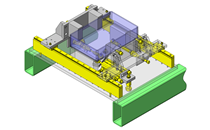
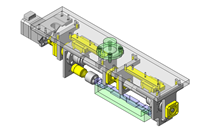
外观尺寸:1262×747×358[mm]
行程:-
速度:0.5m/s
负载:300Kg
主要零件选型理由
零件:脚轮:C-CTGJ100-R
理由:经济型脚轮产品,在满足承载要求的情况下可节约成本。
设计要点
主要零件的计算工序
辅助脚轮的布局方法有很多种。它们具有不同的车轮数量,也具有不同的承载能力。
根据运输设备的自重、最大荷重等参数进行选型计算和校核。
单个轮子所需的载重能力计算如下:
G=(E+Z)/M
G=每个轮子承载的重量
E=AGV自重
Z=AGV载重量
M=有效承载的轮子数量(需考虑位置、重量分布不均的因素)
有效承载的轮子数量M请参考图1中的M数值:
根据本次潜伏式AGV的辅助轮实际布局,与图1中的第三张图吻合,故M=4
但在计算承重轮时要按最大支撑点处脚轮的承重量计算。
脚轮具体受力支撑点如图2,则P1、P2为最重支撑点,故按照该位置放置脚轮。
已知AGV自重320kg,故E=320kg;
已知AGV载重量要求300kg,故Z=300kg;
根据以上计算公式,可得出G=(320+300)/4=155kg≒1550N,
所以选型辅助轮时,注意容许载重需大于G,安全系数可取1.2~1.5。
此脚轮(型号:C-CTGJ100-R)能容许最大负载为2000N,符合使用需求。
构造改善和设计要点
脚轮的布局方式不同对脚轮的承载力要求不同,请根据具体需求进行选择。
脚轮在不同地面情况下磨损、摩擦系数等有所不同,请根据实际情况进行选择。

设计要点,尺寸规格等更多案例信息,请点击进入案例详情