这里介绍一下、直线运行的原点及移动限位的设置、确认操作是否存在等经常会使用光电传感器。
(1)光电传感的种类和特征
形式 | 传感器形状 | 传感器構成 | 特征 | 米思米产品目录NO. |
透过型 | 对向透过型 |
| 检测范围广 | PEX11□ |
透过型 | 凹槽型 | ")
| 卓越的检测精度 | FPM□24 |
反射型 | 回归反射型 |
| 可感应长检测距离 光轴调整简单 | PCX□ |
反射型 | 扩散反射型 | ")
| 单方向感应 | - |
")
")
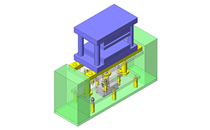
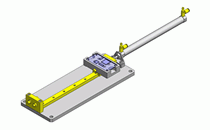
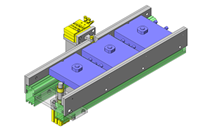
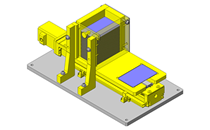
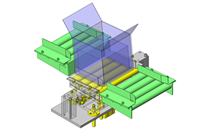
(2)滑动导向结构的定位控制案例
利用滑动导向和滚珠丝杠的构造控制直线运动结构的定位、检测精度采用凹槽型光电传感器。
【照片】X轴-Y轴的双轴机器人构造。X轴、Y轴各自安装3个凹槽型光电传感器控制直线运动。
")
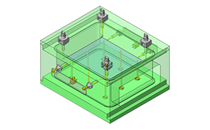
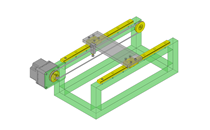
两端的2个传感器为了限制直线运动范围采用限位传感控制、中央的传感器是决定步进电机的旋转开始零点。这个原点传感的位置(电机的旋转角度位置)脉冲为0、希望定位的位置距离(旋转角度)用脉冲值进行编程。
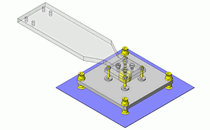
安装在移动侧的被称之为传感器发讯块的遮蔽板、用这个传感器发讯块遮蔽光电传感器检测出光束、是检测移动体位置的系统。
传感器是在传感器用导轨(SEN□B等)上进行简单的定位。