2009年11月25日到28日期间,在东京的BigSight举办了2009国际机器人展,是国内最大规模的机器人综合展览会,今年是第18届。。
日本的机器人技术是走在世界顶端的。此前,曾对机器人的技术动态等为中心来进行过介绍(介绍的目的是使产品制造方面的国际竞争力有进一步提高)。
其中,作为针对(1)削减生产成本、(2)缩短交货期、(3)置换为熟练操作人员等的解决手段,对a) 视觉传感器、b) 力传感器、c) 离线编程系统等作为重要的关键技术进行过介绍。在此基础上,作为超出人类能力的机器人的魅力,我们提出了针对d) 高速化和e) 大型化的技术革新意见。
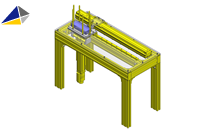
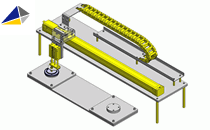
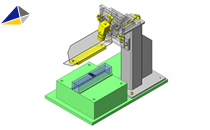
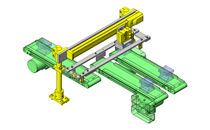
作为拾取和放置用高速机器人,曾展示过很多平移并联机器人的事例介绍。这一类机器人其设计思想与传统的直行坐标系机器人和平面关节型机器人有所不同,它们具有以下特点。
高速并联机器人的特点
A)超高速驱动性能 | 轻量,具有高刚度结构。驱动轨迹的约束条件少这一原因所带来。 |
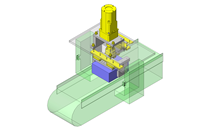
B)节省空间 | 由于是在驱动部的正下方来布置动作区域。因此,可节省空间。 |
C)易于布局 | 由于轻量,并采用箱式外形(无伸出)。因此,布局起来很简单。 |
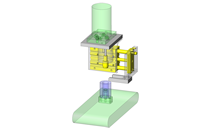
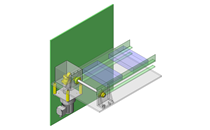
D)易于采取安全措施 | 可使用简单的框架将整个活动范围隔离开来 (参照右下方照片) |

标签:技术展望