概要
即使采用独立的3列搬运辊子配置的机械构造,与基板接触的全部的辊子接触点的摩擦力如果不能均等的话,就会产生玻璃基板的搬运方向发生弯曲的问题。
讲解
之前文章中讲解了在薄板基板的搬运时独立的3列搬运辊子的结构是令人满意的。这里讲解的是使用这个构造时的基板的搬运方向。
1) 辊子配置数量
・为了避免由于基板的变形而产生的搬运力不稳定化的影响,考虑增加基板的支撑点使各个辊子接触点上的荷重和摩擦力稳定化
・但是,只用上述的对策无法使与基板背面相接触的全部的辊子接触点上的摩擦力均匀。
2) 玻璃基板的搬运稳定化
・为了使搬运物笔直的移动到搬运线上,需要使其笔直的面向搬运用的摩擦力的作用方向。
・基板的辊子支撑点数多,使作用在搬送上的摩擦力的方向笔直,这俩件事是没有关联的。
・如果由于某种原因使搬运辊子上产生的摩擦力产生偏差的话,搬运物就不会直线行进,搬运方向改变而发生搬运故障。
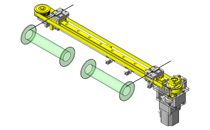
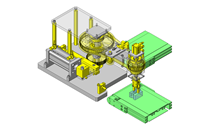
・图1表示的是从基板左端侧的搬运辊子的摩擦力大,越往中央,右端摩擦力越小的情况下的搬运基板的动作形象。作为摩擦力产生偏差的理由,可以设想为1.搬送辊子连接轴的弯曲和2.搬运辊子的偏磨损,3.搬运机水平基准的倾斜等。
・因此,除了采用独立的3列搬运辊子结构,还有必要加入使支撑基板的搬运辊子部的摩擦力均匀化的处理。
")