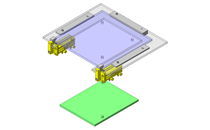
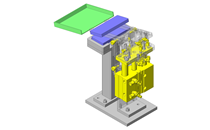
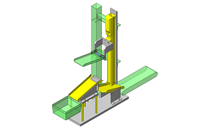
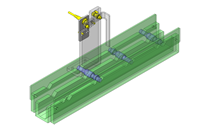
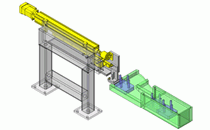
本案例"翻转物的工件检出",即使是反转物也无需担心感应器配线的处理。 用安装底座・支座能够微调整感应器的位置用回归反射型的光电感应器可减少配线,节省空间确认光电感应器的平行移动特性和点距离的表面后,需要调整在检出范围内不加入检出对象以外的感应器的高度及角度送出旋钮的螺距时,需要设置停止时感应器设置在ON,翻转时感应器为OFF。放置旋钮翻转时的光轴的混乱及感应器的错误动作压入工程的感应器位置是用现场调整决定检出高度(为了使压入部和非压入物的上面的距离为10mm以下)感应器的作用仅仅是确认有无工件,不适合用于判断压入精度的场合。
目的・动作
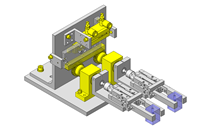
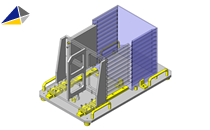
· 用旋动桌在树脂盒子中压入块状的工程
· 各90度翻转用各step施行动作
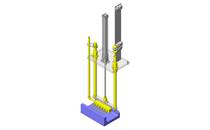
· 用光感感应器(回归反射型)检出各step的工件
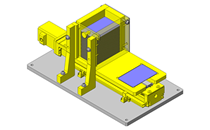
· ST1:放入树脂盒
· ST2:在树脂盒中放入树脂块
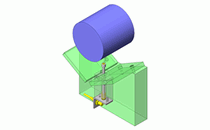
· ST3:在树脂盒中压入树脂块
· ST4:回收组合好的树脂盒
· 用感应器确认各ST有无工件

设计要点,尺寸规格等更多案例信息,请点击进入案例详情