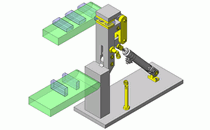
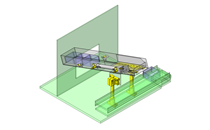
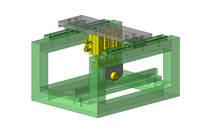
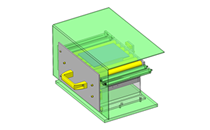
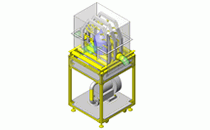
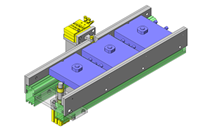
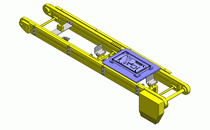
本案例"滑台穿梭传送机构",采用2级滑台,使节拍时间减半。旋转马达后可获得2种皮带行进方向,均可固定滑台。皮带的设计张力为206N,无法承受50N的容许外伸负载,因此添加轴承,并按以下顺序进行组装以保护马达。 ①临时固定已安装马达的螺栓。 ②张紧皮带的张力。 ③安装并正式紧固马达。进行图像识别,通过多轴机器人传送工件,粗略的停止精度即可。在槽下焊接板,以增大因定面加工减小的板厚。已使用原点确定用微型光传感器和微型光传感器(防止超程),作为防止故障发生的措施。上下滑台交叉,可能会导致人员受伤。因此,本组件在周围组件或装置外部设置盖板,确保在手无法触及的场所内使用。
目的・动作
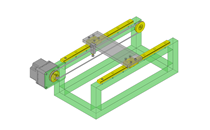
· 使传送工件的2级滑台穿梭的机构。 通过马达和同步齿形带将旋转运动转换为直线运动。 通过1个驱动机构驱动2个滑台。

设计要点,尺寸规格等更多案例信息,请点击进入案例详情