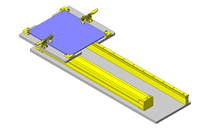
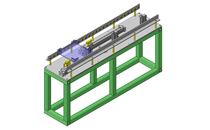
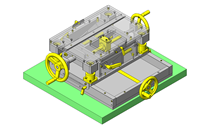
本案例"平板玻璃移动组件",使用单轴机器人半自动搬运。利用电动驱动器和导轨正确移动的结构 。
目的・动作
· 平板玻璃由操作者手动固定,通过单轴机器人搬运到自动作业位置
· 考虑平板玻璃在搬运时会裂开,需要另外考虑到电动驱动器的搬运速度(调节控制)以及降低夹紧面的歪曲程度(平面加工)、夹紧力度的调整
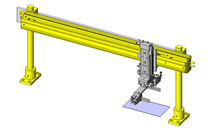
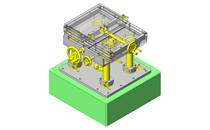
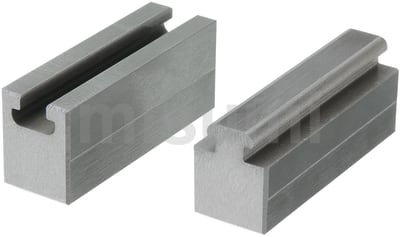
IDEA NOTE1 平板玻璃的固定方法
通过工件导块和紧固手柄简单地固定平板玻璃

设计要点,尺寸规格等更多案例信息,请点击进入案例详情

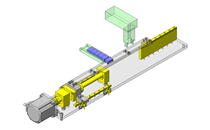
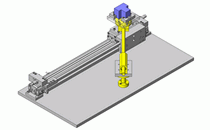
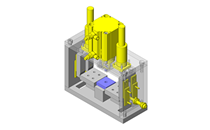
本案例"平板玻璃移动组件",使用单轴机器人半自动搬运。利用电动驱动器和导轨正确移动的结构 。
目的・动作
· 平板玻璃由操作者手动固定,通过单轴机器人搬运到自动作业位置
· 考虑平板玻璃在搬运时会裂开,需要另外考虑到电动驱动器的搬运速度(调节控制)以及降低夹紧面的歪曲程度(平面加工)、夹紧力度的调整
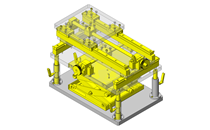
通过工件导块和紧固手柄简单地固定平板玻璃
设计要点,尺寸规格等更多案例信息,请点击进入案例详情