手动平台
结构 | 传送方式 | 轴 | |||||||
1轴 | 2轴 | 3轴以上 | |||||||
X | Z | XY | XZ | XYZ | 其他 | ||||
直动 | 简易调整 | 传送螺丝 | ○ | ○ | ○ | − | − | − | |
支架&小齿轮 | ○ | − | ○ | − | − | − | |||
蚁槽
(价格低中精度) | 支架&小齿轮 | 标准旋钮 | ○ | ○ | ○ | ○ | ○ | − | |
粗微动手柄 | ○ | − | − | − | − | − | |||
传送螺丝 | 标准旋钮 | ○ | ○ | ○ | ○ | ○ | − | ||
六方形扳手式 | ○ | ○ | ○ | − | − | − | |||
※1 线性球
(高精度高耐负荷薄型) | 微型表头 | 标准旋钮 | ○ | ○ | ○ | ○ | ○ | − | |
粗微动・数码 | ○ | − | ○ | − | − | − | |||
传送螺丝 | 传送螺距 0.5 | ○ | ○ | ○ | ○ | ○ | − | ||
传送螺距 1.0 | ○ | ○ | ○ | − | − | − | |||
※1 交叉辊
(高精度轻量) | 微型表头 | 标准旋钮 | ○ | ○ | ○ | ○ | ○ | ○ | |
传送螺丝 | 传送螺距 0.5 | ○ | ○ | ○ | − | − | − | ||
传送螺距 1.0 | ○ | ○ | ○ | − | − | − | |||
方形 | 蚁槽 | 传送螺丝 | ○ | ○ | − | ||||
交叉辊 | 微型表头 | ○ | ○ | − | |||||
旋转 | 手柄・微型表头 | ○ | − | − | |||||



自动平台
结构 | 传送方式 | 轴 | ||||||
1轴 | 2轴 | 多轴 | ||||||
X | Z | XY | XZ | XYZ | 其他 | |||
直动 | 线性球 | 球形螺丝 | ○ | ○ | ○ | − | − | − |
检查辊 | ○ | − | ○ | − | − | − | ||
旋转 | 深槽滚珠轴承 | 蜗杆齿轮 | ○ | − | − | |||
安装部分的表面精度
当安装在平台的下面或上面的零件的平面度不足时,平台本来的性能可能无法得到发挥。
蚁槽式平台
● 读取移动量
● 读取移动量要在游标尺的刻度上读取。
● 游标尺刻度的读取方法如下。
(1)在○B 的刻度上,用1mm单位读取○A 的刻度0的位置○C。(右图23mm)
(2) 看着○A 的刻度,读取与○B 的刻度在同一位置上的刻度○D,将其作为0.1mm位的数値。(右图0.6mm)
(3)(1)和(2)的合计就是它的値。(右图23.6mm)

● Z轴耐负荷
● 蚁槽式平台的支架&小齿轮型,在与Z轴同样竖立使用时,Z轴会发生滑落的问题。
出厂时的始动负荷为0.5kgf~1.0kgf(根据使用频率不同,始动负荷有时会发生变化)。
一旦设定好了位置之后,请用夹子固定平台。
完成固定后,可以将滑落量控制在数μm以下
想要加固夹子的夹紧度时,请使用单卖的带手柄的夹紧螺丝。 (适用平台必须进行确认。)
线性球式平台・交叉辊式平台(共通)
● 导引方式

● 平台面与ガイド导引部が一体構造になっています。因此,比交叉辊导引更加薄、强度更高、更加结实, 精度格外提高了。
● SUS440C、追加了无电解镍镀层(银)、黒色规格(低温黑色镀铬)。

● 追加了带孔的交叉辊式平台。突出了平台本体的位置,可以确保其上安装的作业的再现性。
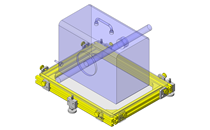
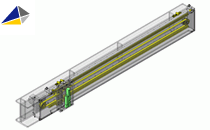
● 安装方法
安装时,要移动平台面后再进行安装。请参考以下图片。
● X轴平台的安装方法
如图所示,将平台面分别向前方、后方移动,便可以进行安装。


● XY轴平台的安装方法
安装方法与X轴平台相同。


● 关于质量
● 笔直度
表示对于直动平台的理想移动轴来说,它是怎样蛇行、移动的。
我们把由理想移动轴(直线)得到的水平方向和垂直方向的偏离复合値的最大値作为笔直度的质量规定。
● 纵摇・偏航
关于平台的纵摇・偏航,用自动自准直望远镜对平台的整个冲程进行测定,取其最大値作为质量规定。
纵摇:平台在移动中,平台面会上下倾斜着移动。(用θy的方形度来表示)
偏航:平台在移动中,平台面会左右倾斜着移动。(用θz的方形度表示)
纵摇


偏航


● 平行度
X轴平台的平行度(1),对于下部的上部平行度,按照右图(a)的方法、对于(2)运动的平行度,按照右图(b)的方法,用示功器(千分表)进行测定。
(1)的平行度在0.03mm以下。
(2)的运动平行度在0.01mm以下。


● XY直交度
有关XY直交度的问题,在各平台的规格表中没有明确说明,但规定是直交轴的偏移最大値在一冲程13mm左右、0.01mm以下。