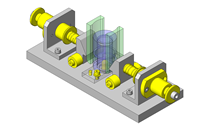
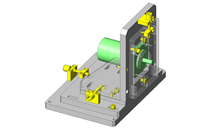
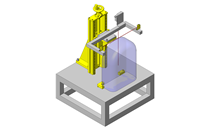
本案例"简易插入取出机构",释放时利用机器人手臂。为了实现滚子轴承随动器的平行度,用1个螺栓以及螺母将2个滚子轴承随动器固定 。
目的・动作
· 工件插入后机械手臂退下,抓住工件,应对搬运时的振动
IDEA NOTE1 用机械手臂松开
使用机械手打开固定夹,通过压缩弹簧夹住无安装盘的工件

设计要点,尺寸规格等更多案例信息,请点击进入案例详情

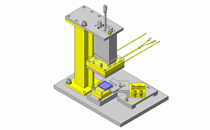
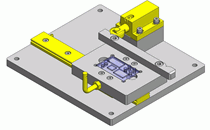
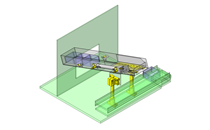
本案例"简易插入取出机构",释放时利用机器人手臂。为了实现滚子轴承随动器的平行度,用1个螺栓以及螺母将2个滚子轴承随动器固定 。
目的・动作
· 工件插入后机械手臂退下,抓住工件,应对搬运时的振动
使用机械手打开固定夹,通过压缩弹簧夹住无安装盘的工件
设计要点,尺寸规格等更多案例信息,请点击进入案例详情