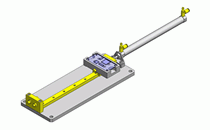
在本期栏目中,对由滚珠丝杠和电动机构成的直线运动机构的运动控制(动作特性和速度特性)做简要解说。与使用凸轮或曲柄机构的直线运动机构相比,由滚珠丝杠和电动机组成的直线运动机构具有优异的控制性,可以同时满足高速化和高定位精度这一对相冲突的性能要求。
(1)动作特性
直线运动的动作可以通过在两端停止和在中间任意位置停止来予以充分表现。
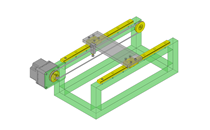
(a)两端停止
通常是将传感器安装在两端以调节驱动位置(防止超程)。而对于气缸等气动设备来说,其结构本身就具有两端的停止限位。
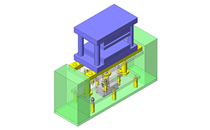
(b)中间停止
中间停止通常对停止位置有精度要求。这与驱动单元的结构、整个直线驱动系统的刚性、驱动控制方式有关。
如果要求的精度为±0.01mm左右,则可以通过采用滚珠丝杠、伺服电机+位置检测器的结构配置,利用适当的加/减速控制条件和背隙抑制控制方法来达到要求。
(2)速度特性(参见【图1】)
")
为了缩短移动时间并在停止时达到较高的定位精度,需要减少由于来自驱动体的惯性力(惯性力矩)所引起的变形载荷。为此,必须减小加速度(α)。然而,简单地降低加速度(α)会延长上升和下降时间。
作为对策,我们需要采用多级变速控制方式,即:在刚刚启动运行后以及即将停止前将加速度降低至接近零,在这两者之间则将加速度增大到很大。
(a)多级变速控制方式
这是提高中间停止位置精度的停止控制方式之一。通过在到达停止位置之前阶段性地改变速度,减少停止时的惯性力。通过预先编程设定高速/中速/低速等多级速度设定,或通过对电机极数进行切换控制等手段,实现速度的分级切换。
(b)加减速控制方式
在刚刚启动运行后以及即将停止前将加速度降低至接近零,在这两者之间则将加速度增大到很大的多级变速控制方式