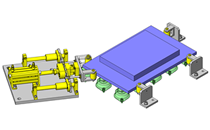
以工件输送带(【照片1】)移动时的工件检测方法为例,说明光电式非接触传感器的使用方法。
")
移动中的工件检测
工件检测有3种方法:1.接触检测,2.非接触检测,3.紧密接触检测。对于移动中工件的检测,由于具备如下特征,所以采用非接触检测方式。
a)不会对工件造成损伤
b)可在机械运行中检测工件
另一方面,需要注意的是,由于与传感器周边机械零件形状之间的关系等原因,检测光的意外行为可能会导致检测异常,从而可能导致设备的运转率降低。
■光电式非接触传感器的使用注意事项
· 请勿让垃圾、灰尘、水滴、处理液、切屑等异物附着在传感器的光发射与接收部分。将传感器安装在异物难以附着的方向上。
例:请勿将传感器朝上安装(容易落上杂物)。
· 选择不会与相邻传感器发生干涉的安装位置。
· 应遮挡来自周围结构的入射光(外部光线入射、传感器反光)。
· 检测对象工件分为不透明/透明,表面的反光率应保持稳定。(尤其是采用反射型传感器时,尤为重要)
· 当移动速度较快时,应选择应答性更高的传感器。
在【照片1】的工件输送带中,是利用3处光电传感器(光束传感器)执行如下控制。
1.当工件被转移到输送带上(【照片】上)时,传感器ON。
2.在输送带的中间位置,按照定位站对准工件的朝向。
3.在输送带末端检测有无工件,并进行控制,以使输送带上放置的工件数量不超过规定数量。