这里介绍一下槽型光电传感器的旋转体原点位置设置
(1)旋转体原点位置的设定方法
旋转体的旋转位置检测方法与直线运动的位置检测方法相同。旋转运动转变为直线运动的情况下有过载的危险性、旋转运动使用这种方法的话不会导致过载。
因此结构上只有旋转角的原点位置设定。这个传感器发讯块作为光子传感器可使用滑动凸轮(参考商品目录P.927:HPSC、HPJC)。这种情况下用电机侧的脉冲数控制旋转角(转数)。
除此以外、可使用多个光子传感器所用的凸轮(参考商品目录P.927:PSC)、还可以通过角度调整的方法直接控制旋转停止位置。
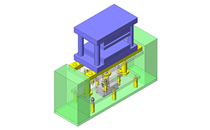
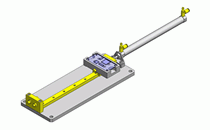
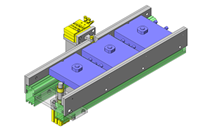
【照片1】凸轮的旋转控制使用槽型光电传感器和光子传感器所用的开口凸轮来控制。为了检测凸轮位置、设置2个光电传感器和开口凸轮。
")
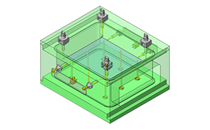
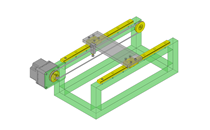
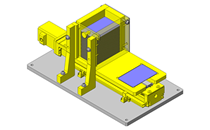
【照片2】开口凸轮扩大照片。用电机转速的关系大幅消减开口幅度、因此米思米的开口幅度·开口形状·开口数·轴口径的变化可能更便捷。
")
(2)传感器配线的处理
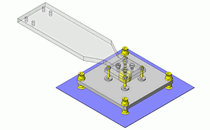
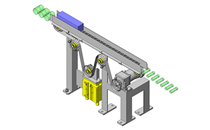
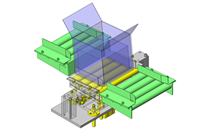
自动化设备故障原因由于传感器配线部分非常的多、必须要认真处理配线。【照片3】是规范的传感器配线案例。配线作业必须要注意以下的要点和美观性。
・避免从接线端子的接线方向过度用力
・配线固定位置要确保操作及维修的便利性。
・注明传感器编号和连接器编号便于维修
・线头要留有移动余量
")