在带有执行器的简单自动化机器(LCA:低成本自动化)上,如果忽略惯性力就无法完成设计。由于惯性力的大小与加速度成正比,因此在需要进行定位停止控制或是提高机器速度以提高生产率的情况下,就会出现问题。
(1)运动方程与惯性力
当加速度α作用于质量为m的物体上时,与作用于该物体上的力F之间存在符合如下公式(运动方程式)的关系。
F=mα…………国际单位制(SI)表达 |
上述运动方程在重力单位制下的表述如下所示。
F=(W/g)α·重力单位制表达 |
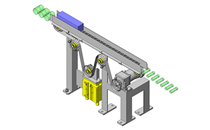
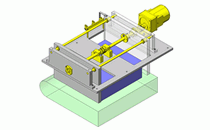
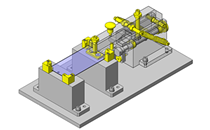
【图1】中的直线运动机构的情况下,滑台和滚珠丝杠螺母的重量W(kg)以加速度 α(m/s2)移动时产生的惯性力F(kgf)可根据上述重力单位制的运动方程式计算得出。
(运动机构的结构设计-3)")
该惯性力F通过滚珠丝杠作用在支撑组件内部的轴承上,而其反作用力则传递到支撑单元,再通过固定螺栓传递到底座。作用在机构上的力就这样通过联动的状态传递给整个机构。因此,机构中强度最低的部分会因变形(弹性变形、塑性变形)而受到精度下降等影响。
从运动方程可以看出,为了减小惯性力F,最好1.减小运动体重量W,2.减小加速度α。代表性的对策示例包括如下内容。
1.减小移动体重量W → 轻量化设计 2.减小加速度α → 采用能够平缓地控制加速度变化,缓和加减速时冲击的加减速控制方式 |