② 各驱动部的方式和结构
③ 手部功能例
各驱动部的方式和结构
关于前一章节介绍的产业机器人的驱动部和可动结构,下面将以“晶片搬运机器人(水平多关节/标量型)”为参考,介绍其中的一个例子。
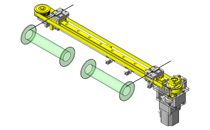
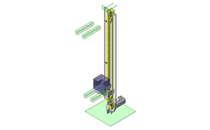
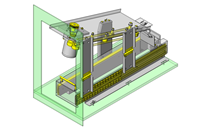
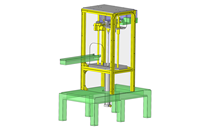
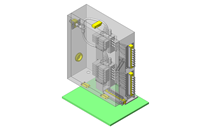
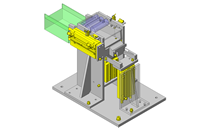
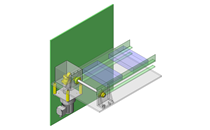
下图是半导体制造装置中搭载的晶圆搬运机器人。
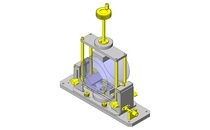
例4) 双臂机器人(4轴规格) ※4轴(R1, R2, Θ, Z)
")
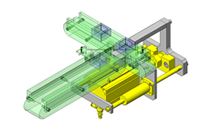
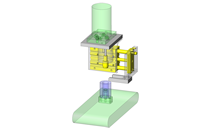
如上图所示,机器人的各驱动部位和负荷支撑部位的机构或结构也是由基本驱动零件组合而成,或者使用直动零件组成。
但是,即使机械方面完成了,通过控制其动作也能让机器人的好坏发生变化。另外,机械设计必须在考虑控制性的同时再决定机构,对于相互不能相让部分如何处理这个问题,也是机器人开发的难点之一。