机器人相关
产品介绍
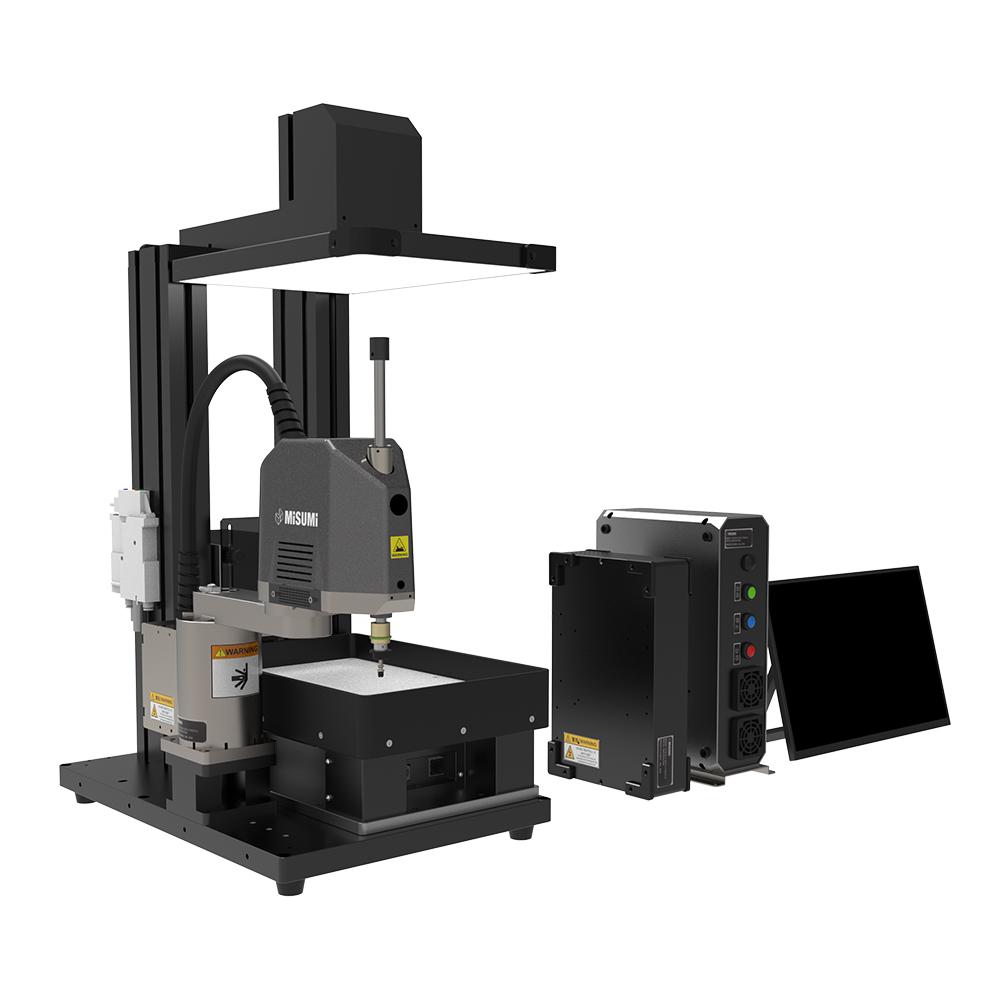
包含末端夹爪、换枪盘、防撞保护器及机器人第七轴等周边辅助连接部件。用于扩展工业机器人的作业功能、增强柔性生产能力并确保机器人系统高效、安全地安全运行。

品牌优选











实用案例
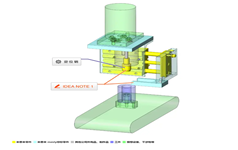
No.007554防止工件脱落的机器人手臂
 2020.05.25 09:40:00
2020.05.25 09:40:00
 1241
1241
本案例"防止工件脱落的机器人手臂",机器人无论向哪个方向高速移动,工件也不会下落。以节省空间为目的,在支架上并列安装气缸为了实现轻量化,形成去除中央部分的卡盘形状
。目的・动作· 使用气缸,机器人来回摇晃也不会掉落的紧抓结构IDEA NOTE1 防止工件脱落的自动夹具工件上安装销,进一步从下方支撑住,机器人再怎么晃动,工件也无法脱落设计要点,尺寸规格等更多案例信息,请点击进入案例详情




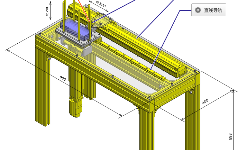
No.000034使用了单轴机器人的轻载传送装置
2020.03.25 19:20:25
2205
本案例"使用了单轴机器人的轻载传送装置",带使用凸轮轴承随动器的浮动机构的单轴导轨。考虑到框架的刚性,在截面惯性矩较大的方向配置铝合金型材。目的・动作· 逐个对通过料架传送的工件进行间距输送,并进行提升、传送的机构。 设计要点,尺寸规格等更多案例信息,请点击进入案例详情

技术文章
单轴机器人的产品特点和使用注意事项
2022.12.01 16:57:42
2440
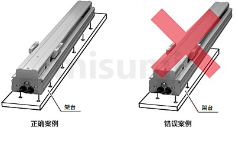
使用方法■ 系统组成安装定位方法型号螺栓紧固扭矩RS1内六角M5螺栓、强度8.8T 长度:底座厚度 +8mm 以下60kgf•cm ~ 90kgf•cmRS2/RS3内六角M6螺栓、强度8.8T 长度:底座厚度 +8mm 以下100kgf•cm ~ 130kgf•cm系统组成组成部件(案例)手持终端设备(选配件) EXRS-H1 EXRS-HD1支持软件(选配件) EXRS-ST1 EXRS-ST2高位控制装置(PLC等) 客户自备RS102B-C1-N-3-400 使用案例设备名称:NG工件引入机构 机构设计要点: 1. 引入支架上承载工件并移动时作为防止掉落的对策,接触部位设定倾斜面位置使其偏移10°。 2. 为了进行滑槽的接收位置的前后调整,支架上设置长孔槽 详细请参考此处 注意事项■ 单轴机器人使用环境 使用环境: 0 ~40℃ 允许环境相对湿度:35 ~85% RH 以下 ( 无结露) ■ 为了保证控制器正常动作,请避免在下列环境中使用 ①含有硫酸、盐酸等腐蚀性气体和可燃性气体、易燃性液体的环境 ②粉尘、灰尘较多的场所 ③其他机器的切屑和油、水会溅到的场所 ④有较大震动的场所 ⑤会产生电磁干扰、静电干扰的场所 ⑥日光直射场所 ■ 安装机器人所使用的底座必须符合下列条件。 初次使用者,请务必阅览单轴机器人使用说明书。 ①安装底座在机器人动作中会受到较大的反作用力,因此应使用具有足够刚性和稳定性的物体。 ②底座的机器人安装面的平面度和水平度应精度在±0.05/500mm以内。 ③请使用指定数量的螺栓以及有足够大小安装机器人的底座。在底座上安装机器人的螺栓不得低于规定数量,避免有右下图所示只固定一半。 ■ 米思米单轴机器人 商品筛选页面 请参考这里 计算软件 ■RS设计选型软件 相关产品单轴机器人 RS1滑块型单轴机器人 RSD2轴杆型经济型 铝合金内嵌式模组 E-MGT5系列代表型号: RS102-P1-3-100代表型号: RSD202-L-C1-P-3-100代表型号:E-MGT5-L5-200-BC-M10-C 应用业界电子/家电汽车医疗智能手机半导体锂电池

各驱动部的方式和结构-精密搬运篇2“精密搬运机器人的
2020.03.22 14:34:58
3792
① FA用机器人的种类和用途 ② 各驱动部的方式和结构 ③ 手部功能例 各驱动部的方式和结构 关于前一章节介绍的产业机器人的驱动部和可动结构,下面将以“晶片搬运机器人(水平多关节/标量型)”为参考,介绍其中的一个例子。 下图是半导体制造装置中搭载的晶圆搬运机器人。 例4) 双臂机器人(4轴规格) ※4轴(R1, R2, Θ, Z) 如上图所示,机器人的各驱动部位和负荷支撑部位的机构或结构也是由基本驱动零件组合而成,或者使用直动零件组成。 但是,即使机械方面完成了,通过控制其动作也能让机器人的好坏发生变化。另外,机械设计必须在考虑控制性的同时再决定机构,对于相互不能相让部分如何处理这个问题,也是机器人开发的难点之一。

FA用机器人的种类和用途-精密搬运篇2“精密搬运机器
2020.03.22 11:41:15
1611
① FA用机器人的种类和用途 ② 各驱动部位的方式和结构 ③ 手部功能的例子 FA用机器人的种类和用途 FA生产线的各装置内或者各装置之间,多会使用“机器人”来精密地搬运工件。 针对相邻装置之间交接搬运工件(或者装有工件的收纳盒等),装置内部点对点精密地搬运工件(以及定位)等,“滑台”不能完全应对的三维长距离移动和搬运重物等用途,存在各种各样的“机器人”这种精密搬运自动装置来应对各种目的。 首先,我们将介绍众所周知的“产业机器人”。 例1) 垂直多关节机器人 例2) 玻璃基板搬运机器人 例3)并联机器人 用途: 搬运/装配用途 用途: 搬运液晶玻璃 用途: 取出&放置 一般的,比较有名的产业机器人就是例1)所示的垂直多关节型。 一般由6个轴组成,根据用途组装成各种类型,已被汽车生产线为代表的所有行业用于生产设备。 例2)表示FPD(Flat Panel Display)生产线中使用的大型液晶玻璃搬运用双腕型机器人。 如照片所示,该机器人利用具有多根手指的碳材质的手形态,吸附固定着液晶玻璃基板并搬运。多用于从缓冲区中取出并装入收纳盒中等用途。 例3)是近年开发的采用并联机构的机器人。 分为3个系统的连接结点的前端部位安装有手来使用。该形态和运动机构可以有效节省装置空间并提高速度。代表性的使用用途是快速拾取食品相关或小型零件(电子零件等)进行装配和排列等。 这是新型机器人,预计今后还会进一步开发,提高完成度(特别是路径行动和精度),从而扩大用途。