步进电机(5相型)、每转分为500步、基本步距角0.72度作为控制单位、可以简单的控制旋转角度和速度的电机。这里介绍一下使用相同的步进电机转换励磁方式实现高精度化的方法。
(1)步进电机的复习
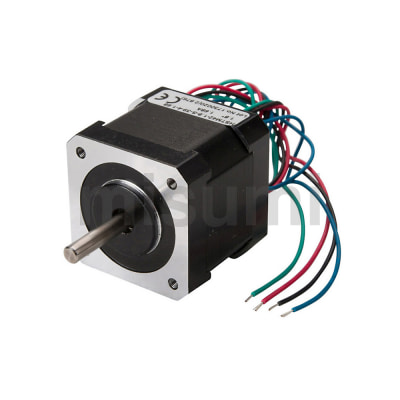
・步进电机是由电机和电机驱动(驱动回路)和控制器(脉冲发生器)组成。
・电机的旋转角度(位置)和旋转角度的控制由控制器的脉冲信号来控制。
・从控制器传导出来的脉冲信号用基本步距角(0.72度)为单位进行控制。
・电机转动控制由PLC(序列控制器)连接到控制器的上位进行自动控制
因此、电机的位置精度提升及速度界限的提升是与控制器的高速控制性能和基本步距角的数值有关联。一方面、控制结构是可移动物体的重量(荷载)及摩擦阻力等的旋转扭矩承受荷载产生摩擦。
因此、电机容量不足的情况下、过载状态(可移动侧的阻力大于旋转扭矩等)及、速度突然变化时、电机的转动不跟随控制器的控制信号(无法同步)会出现这种现象。
(2)步进电机的定位高精度化
5相的步进电机、利用电机驱动程序的内部开关及外部信号、即使相同电机可以选择以下2种类型的基本步距角。
■ 全阶段规格 |
因此全阶段规格在控制结构中选择半阶段规格时、可以将旋转位置精度提到2倍。反之旋转速度降低到1/2。利用全阶段和半阶段的区分使用、可选择定位分辨率也可抑制振动。
下回介绍、工件搬送用输送机案例、LCA结构的设计要点。