由于拾取和放置(P&P)机构需要直接接触自动机机构部,因此需要与工作特征相匹配的设计(结构,材料,运动方式,尺寸等)。下面将以宾果自动机为例进行解说。
・P&P机构是进行「Pick」=拾取与「Place」=放置处理的机构。
・下述可作为P&P机构被采用的示例。
取放机构的用途 | 事例的解说 |
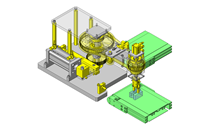
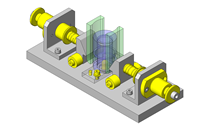
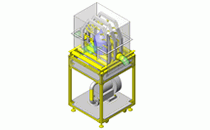
零件定位 | (1) 从零件进给器转移到自动机工作架(【照片1】) |
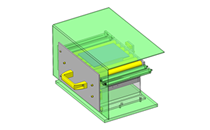
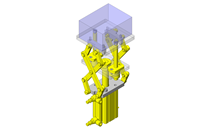
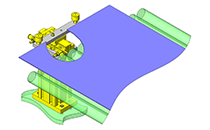
姿势改变的预处理 | (4) 用于反转或变更方向时的取放(【照片3】) |
分拣处理 | (5) 用与检查后的排序或分拣处理 |
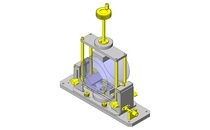
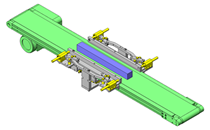
・由于P&P的手动部分,以重复操作为前提,所以对于处理时间以及驱动的可靠性就变得极为重要。如果在易于操作的工作环境下,常使用气缸的直线运动滑块以及手动元件。但当使用精细零件或工作环境比较脆弱时,可以用真空吸盘(【照片2】)和各种传感器(真空传感器,光电传感器)等轻柔并确实有效地进行操作。
")
")
")