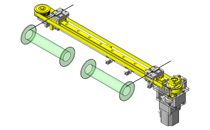
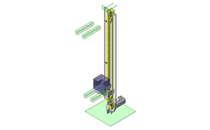
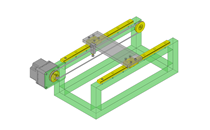
在本期栏目中,以使用小型、廉价且易于使用的步进电机和同步带的单轴机器人(参见【图1】)为例,对步进电机的精度要求进行说明。
")
(1)计算电机所需的旋转精度
对于将电机的旋转运动转换为直线运动的机构,直线运动机构所需的定位精度与对其进行控制的电机旋转精度之间的关系可以通过下式计算得出。
")
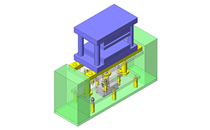
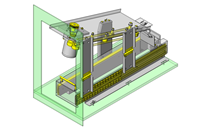
该公式将直线方向上所需的定位精度转换为360度的角度上所需的旋转精度,从而更容易理解【图2】中的关系。
")
(2)案例
1.下方的方框内是同步皮带和皮带轮候选型号,直线运动所需的定位精度A=±0.1mm。
")
")
2. 采用滚珠丝杠时
上述计算电机所需精度的方法也可适用于使用滚珠丝杠的场合。只需将上式中的P从皮带轮的节距改为滚珠丝杠的导程即可。